
Startseite
Gleichstrommotoren
Schrittmotore
|
| StartseiteGleichstrommotorenSchrittmotore |
|
|
Seitenanfang |
|
Permanent-Schrittmotor |
 Sobald nun z.B. Strang 1 (blau) bestromt wird, bildet sich am Stator oben ein Nordpol und gegenüber ein Südpol. Der magnetische Kreis bildet sich
über den Stator und den senkrechten Schenkel des Rotors aus. Dadurch entsteht ein Drehmoment, das versucht, den Rotor in eine Lage zu ziehen,
wie sie im nebenstehenden Bild gezeichnet ist. Hat der Rotor diese Lage erreicht, ist der magnetische Kreis optimal geschlossen, der magnetische
Widerstand (Reluktanz) des Kreises hat nun den geringsten Wert. Die Kräfte und Momente verschwinden in exakt dieser
Stellung.
Sobald nun z.B. Strang 1 (blau) bestromt wird, bildet sich am Stator oben ein Nordpol und gegenüber ein Südpol. Der magnetische Kreis bildet sich
über den Stator und den senkrechten Schenkel des Rotors aus. Dadurch entsteht ein Drehmoment, das versucht, den Rotor in eine Lage zu ziehen,
wie sie im nebenstehenden Bild gezeichnet ist. Hat der Rotor diese Lage erreicht, ist der magnetische Kreis optimal geschlossen, der magnetische
Widerstand (Reluktanz) des Kreises hat nun den geringsten Wert. Die Kräfte und Momente verschwinden in exakt dieser
Stellung.
 Nun schaltet man den Strom vom Strang 1 auf den Strang 2 (grün) um. Jetzt liegt das zweite Polpaar des Rotors dem angesteuerten Stator am
nächsten. Wiederum tritt ein Drehmoment auf, welches den Rotor in die nächste Position zieht. Der Motor hat einen Schritt ausgeführt.
Nun schaltet man den Strom vom Strang 1 auf den Strang 2 (grün) um. Jetzt liegt das zweite Polpaar des Rotors dem angesteuerten Stator am
nächsten. Wiederum tritt ein Drehmoment auf, welches den Rotor in die nächste Position zieht. Der Motor hat einen Schritt ausgeführt.
 Um einen weiteren Schritt auszuführen, ist der Strom vom Strang 2 auf den Strang 3 (rot) umzuschalten. Damit ist ein kompletter Ansteuerzyklus
ausgeführt.
Nach drei Schaltschritten hat dieser Motor also genau eine Viertel Umdrehung vollbracht, der Schrittwinkel beträgt also genau
30°. Durch die Festlegung der Polpaarzahl im Stator und die dazu passende Gestaltung des Rotors lassen sich natürlich Motoren mit anderen
Schrittwinkeln konstruieren.
Um einen weiteren Schritt auszuführen, ist der Strom vom Strang 2 auf den Strang 3 (rot) umzuschalten. Damit ist ein kompletter Ansteuerzyklus
ausgeführt.
Nach drei Schaltschritten hat dieser Motor also genau eine Viertel Umdrehung vollbracht, der Schrittwinkel beträgt also genau
30°. Durch die Festlegung der Polpaarzahl im Stator und die dazu passende Gestaltung des Rotors lassen sich natürlich Motoren mit anderen
Schrittwinkeln konstruieren. Auf diesem Bild wird der Gesamtaufwand zum Betrieb eines Schrittmotors dargestellt:
Auf diesem Bild wird der Gesamtaufwand zum Betrieb eines Schrittmotors dargestellt:Reluktanz-Schrittmotor |
|
Anwendungsbeispiel |
 |
Dieser Permanent Schrittmotor (Schrittmotor mit Dauermagnet als Rotor) hat ein Ständergehäuse aus Weicheisen (blau)
(um den magnetischen Fluss zu leiten). Außerdem findet man am Ständer 4 Polschuhe mit den zugehörigen Ständerwicklungen, von denen die zwei
gegenüberliegenden jeweils in Reihe geschaltet sind. Die Anschlüsse der Wicklungspaare muss so sein, dass sich ihre Magnetfelder jeweils zu
einem homogenen Feld im Motorinneren ergänzen. Der Läufer besteht bei diesem Motor jedoch aus einem einpolpaarigen Permanentmagneten mit einem Nord- und einem Südpol. Elektrische Schaltung und Schritterzeugung:Eine geeignete Gleichspannungsquelle (U) ist über den Schalter S1 zu- / abschaltbar. Wenn S1 geöffnet ist, sind alle 4 Spulen im Motor stromlos und er lässt sich durchdrehen, wobei jedoch die Schrittweite deutlich spürbar ist.Immer dann, wenn der Rotor genau einer Ständerwicklung gegenübersteht, ist der magnetische Fluss maximal, und der Rotor ist nur gegen einen merklichen Widerstand aus dieser Stellung herauszudrehen. Dies gilt auch für den stromlosen Zustand, jedoch ist dann der Widerstand gegen Verdrehung kleiner |
|
Schaltet man S1 ein, so fließt Strom durch alle Wicklungen L1 ... L4, so dass sich z.B. die im oberen Bild dargestellte Situation ergibt. Der Rotor
stellt sich passend zum Gesamtmagnetfeld, dass aus der Überlagerung der durch alle Ständerwicklungen erzeugten Einzelmagnetfelder resultiert.
Versucht man nun, die Welle zu bewegen, benötigt man ein wesentlich größeres Drehmoment als im stromlosen Zustand. Dieses Moment nennt man Rastmoment oder Haltemoment. (Der Motor hat sozusagen die Handbremse angezogen.) ACHTUNG: Ein sich nicht bewegender Schrittmotor bedeutet nicht STROMLOS. Es kann der Haltestrom fließen, der zu einer deutlichen Erwärmung des Motors bis zur Überhitzung führen kann. Betätigt man nun S4, so ändert sich die Stromrichtung durch L2 und L4 und damit auch die Magnetfeldpolung dieser Spulen. Daraus folgt natürlich auch eine Verdrehung des aus allen 4 Spulen resultierenden Magnetfelds, wodurch ein Drehmoment auf den Rotor entsteht, das ihn in die neue Stellung zieht. Da die Spannung an den Spulen ihre Polarität je nach Schalterstellung ändert, heißt dieser Motor bipolarer Schrittmotor (zwei Polungen). Nach außen ist der Motor durch vier Anschlussleitungen verbunden. |
|
Betätigt man nun S3, so ändert sich die Stromrichtung durch L1 und L3 und damit auch die Magnetfeldpolung dieser Spulen. Daraus folgt natürlich
auch eine Verdrehung des aus allen 4 Spulen resultierenden Magnetfelds, wodurch ein Drehmoment auf den Rotor entsteht, das ihn in die neue
Stellung zieht. Die in diesem Bild eingezeichneten gelben Linien sollen die magnetischen Flusslinien darstellen. Wie man sieht, ist in dieser Rotorstellung der Weg des magnetischen Flusses durch die Luft minimal. Damit wirkt gerade in dieser Stellung kein Drehmoment auf den Rotor. Versucht man jedoch den Rotor etwas aus dieser Lage herauszudrehen, so wirkt dem ein zunächst stärker werdendes Magnetfeld entgegen, gleichgültig in welche Richtung man zu drehen versucht. Der Rotor ist somit in einem stabilen Gleichgewicht. Wie alle magnetischen Feldlinien sind auch diese in sich geschlossen. |
|
Schaltet man nun S4 wieder in seine Ursprungsstellung, so ändert sich die Stromrichtung durch L2 und L4 und damit auch die Magnetfeldpolung
dieser Spulen. Daraus folgt natürlich auch eine Verdrehung des aus allen 4 Spulen resultierenden Magnetfelds, wodurch ein Drehmoment auf den
Rotor entsteht, das ihn in die neue Stellung zieht. Slebstverständlich kann man diese Schaltung nachbauen und ausprobieren, insbesondere zur Demonstration der Funktion eines Schrittmotors. Dann kommt es auf die Geschwindigkeit und das Geschick des Bedieners an, wie gleichmäßig und flott sich der Motor dreht. Da für diese Motorsteuerung jedoch nur 2 Zustände (dual) von 2 Schaltern zuständig sind, ist für diese etwas stupide Arbeit ein Digitalrechner besser geeignet als jeder Mensch: Der kann sehr gut zählen und sehr schnell schalten. In allen industriellen Anwendungen werden Schrittmotoren daher von einem Rechnerprogramm gesteuert. |
|
|
Um nun endlich eine Umdrehung zu vervollständigen, muss nur noch S3 wieder in seine Ursprungsstellung gebracht werden. Für 360° sind also
bei diesem Motor vier Schaltvorgänge erforderlich. Der Schrittwinkel beträgt also 90°. Reale Schrittmotoren haben oft Schrittwinkel von 1,8°, 2° oder 2,5°. Dies erzielt man durch mehr Polpaare im Ständer aber vor allen Dingen durch Gestaltung des Rotors. Eine nette Stepper Animation hierzu findet man auf der Site von Ian Harries |
 Den Schaltplan von einem unipolaren Schrittmotor sehen Sie links im Bild. Der Name deutet an, dass jede der acht
Ständerwicklungen nur in eine Richtung vom Strom durchflossen wird, falls überhaupt. Auf jedem Polschuh sind zwei entgegengesetzt gewickelte
Spulen, von denen je 2 gegenüberliegende so zusammengeschaltet sind, dass sich deren Magnetfelder zu einem möglichst homogenen Magnetfeld
in der Motromitte überlagern. Unipolare Schrittmotore erkennt man an den fünf oder sechs Anschlussleitungen, je nach dem, ob
die Masse für alle Spule gemeinsam herausgezogen wird oder jeweils für 2 Spulenpaare getrennt.
Den Schaltplan von einem unipolaren Schrittmotor sehen Sie links im Bild. Der Name deutet an, dass jede der acht
Ständerwicklungen nur in eine Richtung vom Strom durchflossen wird, falls überhaupt. Auf jedem Polschuh sind zwei entgegengesetzt gewickelte
Spulen, von denen je 2 gegenüberliegende so zusammengeschaltet sind, dass sich deren Magnetfelder zu einem möglichst homogenen Magnetfeld
in der Motromitte überlagern. Unipolare Schrittmotore erkennt man an den fünf oder sechs Anschlussleitungen, je nach dem, ob
die Masse für alle Spule gemeinsam herausgezogen wird oder jeweils für 2 Spulenpaare getrennt.Permanent-Schrittmotor |
|
Schrittmotorsteuerung über Micro-Controler |
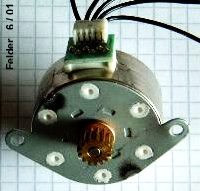
 Auch dieser Motor hat als Rotor einen vielpolpaarigen Permanentmagneten. Durch Widerstandsmessung an den Anschlussleitungen erhält man
jeweils an den beiden roten und blauen Anschlüssen einen Wert von 3,2W. Da es also nur 2 Spulen im Motor
gibt, müssen die Spulen abwechselnd in verschiedenen Richtungen Strom leiten. Diese Motoren nennt man bipolar.
Auch dieser Motor hat als Rotor einen vielpolpaarigen Permanentmagneten. Durch Widerstandsmessung an den Anschlussleitungen erhält man
jeweils an den beiden roten und blauen Anschlüssen einen Wert von 3,2W. Da es also nur 2 Spulen im Motor
gibt, müssen die Spulen abwechselnd in verschiedenen Richtungen Strom leiten. Diese Motoren nennt man bipolar.
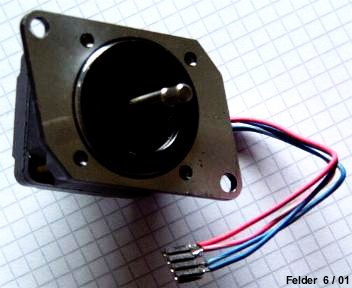
 Die Innenansicht eines ebenfalls bipolaren Schrittmotors zeigt dieses Bild. Die Büroklammer gehört natürlich nicht zum Motor. Sie soll lediglich
beweisen, dass der Rotor als Permanentmagnet ausgeführt ist.
Die Innenansicht eines ebenfalls bipolaren Schrittmotors zeigt dieses Bild. Die Büroklammer gehört natürlich nicht zum Motor. Sie soll lediglich
beweisen, dass der Rotor als Permanentmagnet ausgeführt ist.
 Auch winzige Schrittmotoren sind verfügbar. Diese erzeugen naturgemäß auch nur kleine Drehmomente. Im Kfz findet man solche Motörchen z.B. als
Zeigerantrieb der Instrumente im Armaturenbrett.
Auch winzige Schrittmotoren sind verfügbar. Diese erzeugen naturgemäß auch nur kleine Drehmomente. Im Kfz findet man solche Motörchen z.B. als
Zeigerantrieb der Instrumente im Armaturenbrett.
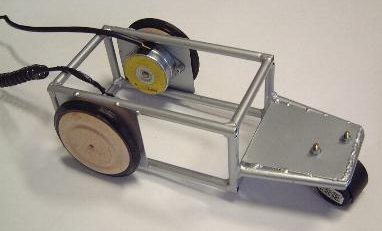 |
Das Fahrzeug besteht aus einem Gitterrohrramen mit je einem Berger RDM 57 Schrittmotor an beiden Hinterrädern und einem schwenkbaren Rad vorn. |
Das Fahrzeug wird über Steuermodule an den PC (LPT1) angeschlossen. Da die Motore einzeln exakt und unabhängig ansteuerbar sind, kann man
mit einer geeigneten Programmierung verschiedene Bewegungen erzeugen:
|
Anwendungsbeispiel |
|
Anwendungsmöglichkeiten im Kfz |
Schrittmotorsteuerung über Micro-Controler |
|
Seitenende |
 |
Quickstart |  |
 |
 |
 |
 |
Seite:79 |